Na aula anterior, foi apresentado o conceito de grandezas vetoriais e como os vetores são definidos no espaço geométrico. Ainda, outros conceitos abordados foram o de operações de soma e subtração de vetores e ângulos entre vetores. Esse conceitos serão fundamentais para essa e para as aulas subsequentes.
Nesta aula, será apresentada a definição algébrica de um vetor no plano (IR2) e no espaço (IR³), mostrando suas representações gráficas. Quando descrevemos vetores no plano, é de entendimento que o vetor possui uma representação bidimensional, ou seja, pertence ao conjunto dos números reais de duas dimensões, também representado pela sigla IR2. Já para vetores no espaço, a representação dos vetores é tridimensional, pertencendo ao conjunto dos números reais de três dimensões, o IR3.
Ainda, nesse momento serão definidas algebricamente as operações de soma de vetores e multiplicação de vetor por um escalar.
Vetores – tratamento algébrico (IR2 e IR3)
1. Vetores no plano (IR2) e no espaço (IR3): representação gráfica
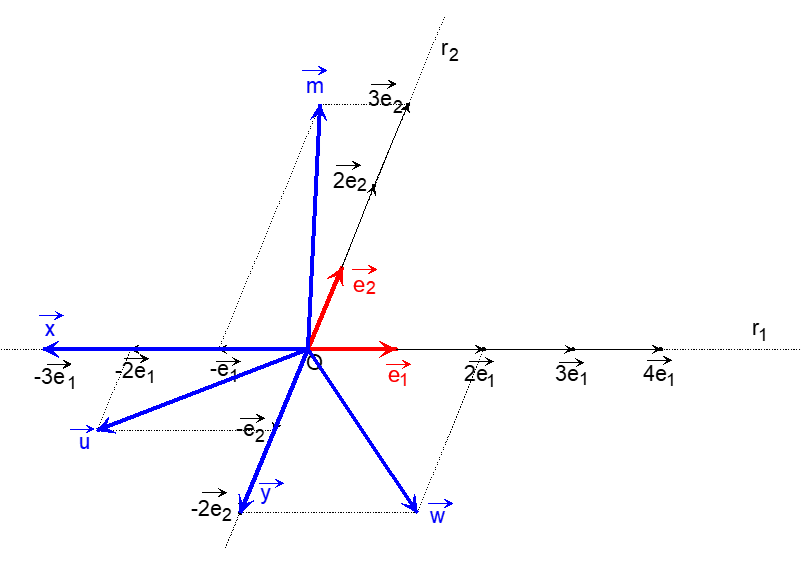
Sejam e1→e1 e e2→e2 dois vetores no plano não paralelos e representados com a origem no mesmo ponto O, e as retas r1r1 e r2r2 contendo esses representantes, respectivamente, é apresentada a seguinte figura para o prosseguimento dos conceitos:
Os vetores w→,m→,u→,x→w,m,u,x e y→y representados na figura são expressos em função de e1→e1 e e2→e2 por (lembre-se da regra do paralelogramo para somar vetores):
w→=2e1→−2e2→w=2e1−2e2
m→=−e1→+3e2→m=−e1+3e2
u→=−2e1→−e2→u=−2e1−e2
x→=−3e1→+0e2→x=−3e1+0e2
y→=0e1→−2e2→y=0e1−2e2
De modo geral, um vetor qualquer pode ser representado pela seguinte relação: v→=a1e1→−a2e2→v=a1e1−a2e2, com a1a1, a2∈a2∈ IR.
Desse modo, os vetores w→,m→,u→,x→w,m,u,x e y→y são expressos em função de e1→e1 e e2→e2 ou que são combinações lineares da base B={e1→,e2→}.B={e1,e2}. Uma base é a região no plano ou no espaço que contempla os vetores.
Observações:
i) Qualquer conjunto de dois vetores não paralelos constitui uma base no plano.
ii) Uma base {e1→,e2→}{e1,e2} é dita ortonormal se os seus vetores forem ortogonais e unitários, isto é, se e1→⊥e2→e1⊥e2 e ∥e1→∥=∥e2→∥=1.∥e1∥=∥e2∥=1.
Base canônica: